
- Calculation of
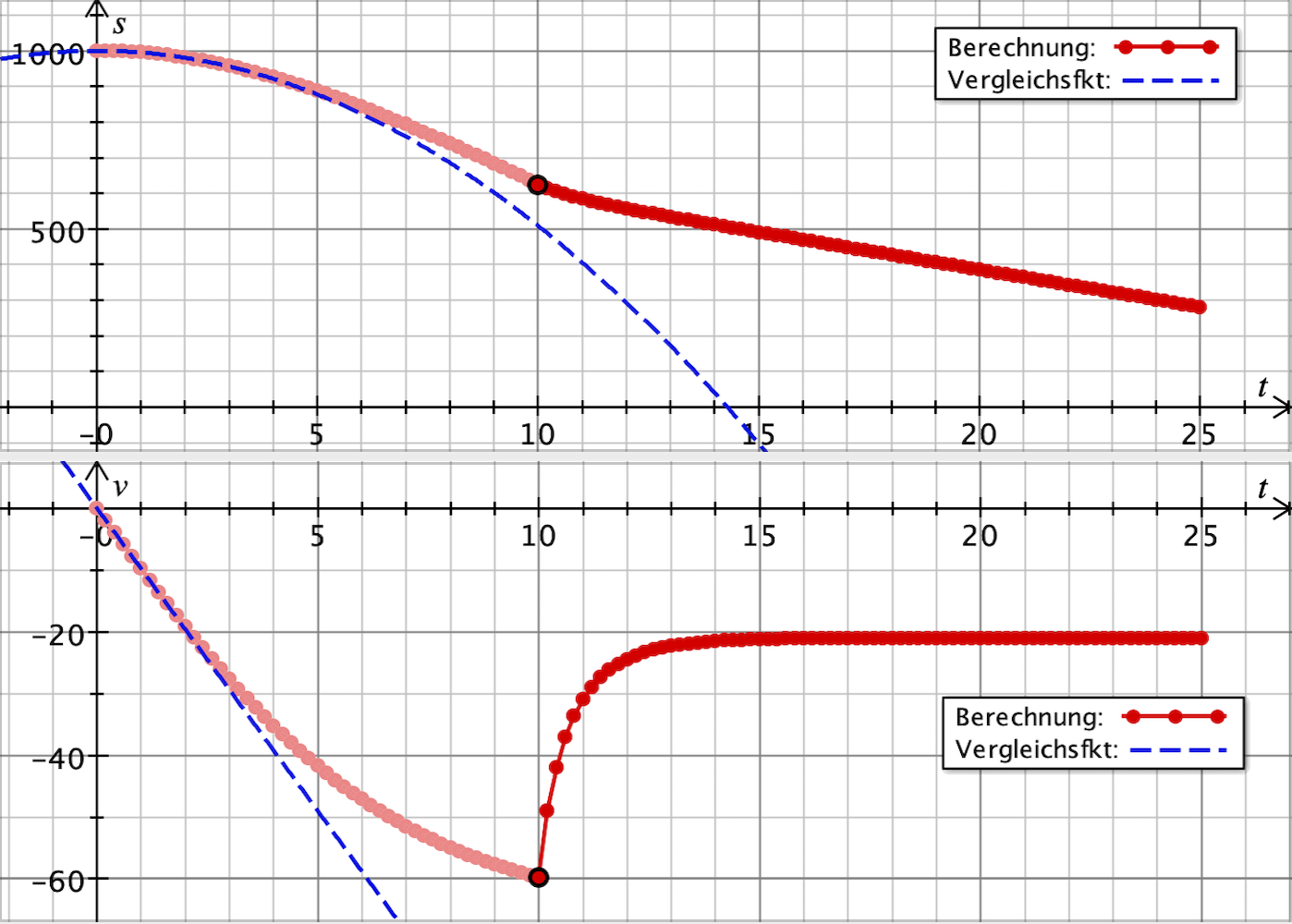
mechanical movements - Clear graphical output
- Interactive solutions using parameter sliders
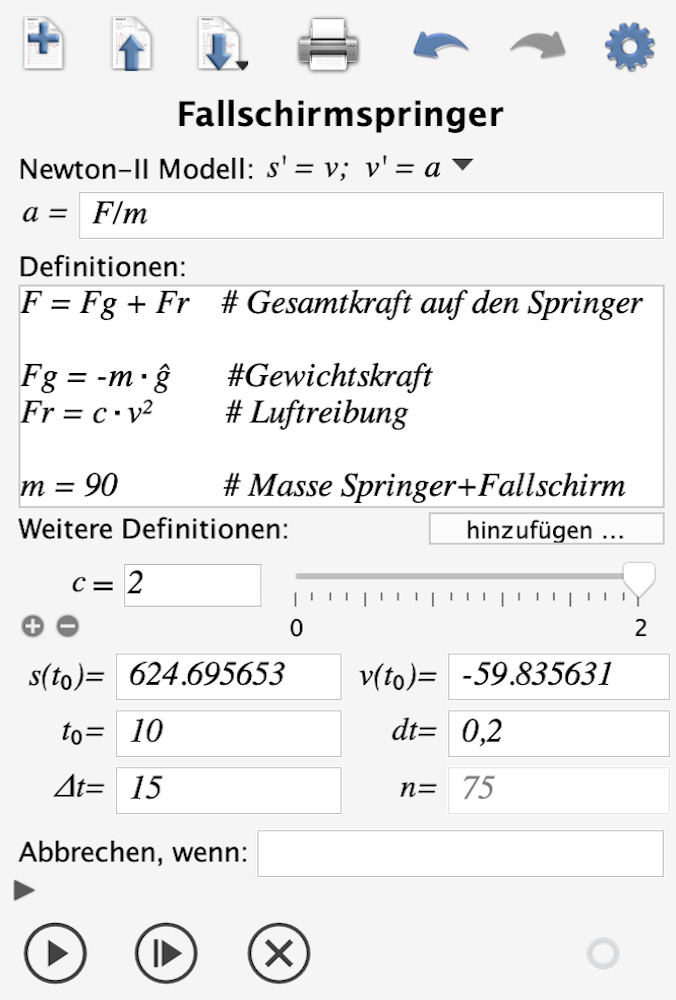
Newton-II allows a direct representation of the solutions by simply entering a force equation.
By rapid numerical calculation of the quantities of acceleration, velocity, and position, Newton-II makes it very easy achieve your goal thus quickly obtain an overview of the behavior of mechanical system.
Details

The differential equation is programmed in such a way that, from the acceleration a, the velocity v and hence the position s are calculated over time. The input of the acceleration a can be done directly or by means of arbitrarily connected terms and expressions (system of equations).
The solution method implemented is, among others, a numerically very robust 4th order Runge-Kutta method with step size control. The output of the results is done both graphically and as a value table, which can be exported for further analysis.
Particularly noteworthy are the ability to enter any (1 to 3 - dimensional) force laws and the interactive change of any number of parameters using sliders. Furthermore, the graphical representation can be altered in a very intuitive manner with the mouse, and the solutions can also be displayed in the value table.
When designing the program, special attention was paid to clarity and user-friendliness, making it suitable for lecture purposes, as well as for practice and self-study.